Well, I do know of a prosthetic foot that was developed by some students at the University of Michigan which harnesses the kinetic energy during the first stages of gaiting (heal contact with floor) to use later on (ankle push-off). The energy is stored in a spring located on the rear foot and then is dispensed on the command of a micro controller. Here's the featured article:

And some close up shots:


Try to abuse the concept of the heal contact and instead of dispensing the energy for ankle lift-off, use it for another purpose.
As for calculating how much electric energy is delivered by the system, it depends on the mechanical system used for storing the kinetic energy in the first place. Usually, a shaft of a motor is used to harness the power during it's rotational motion. This is because during the rotation of the shaft (rotor section of the motor), a magnetic field is induced by the magnet placed on the rotor (as seen in image below):
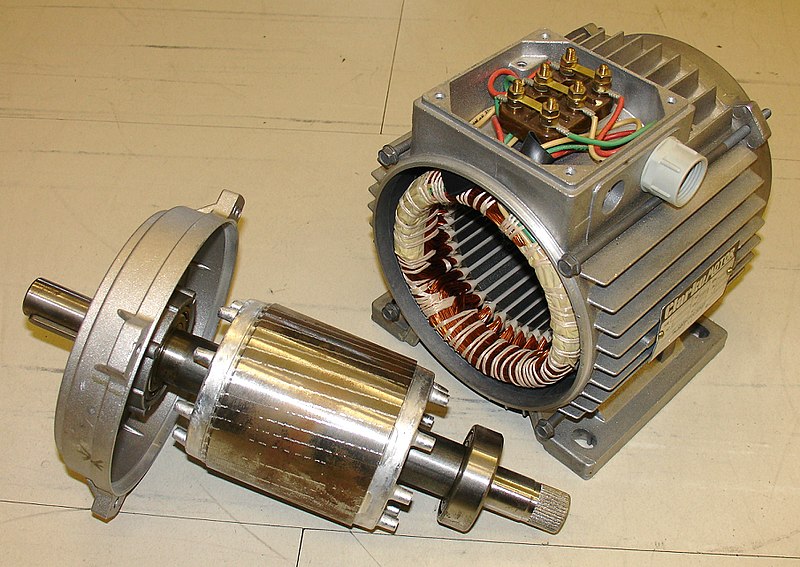
The magnetic field is then converted to electric field (Lenz's law). The relations between the torque and speed of the shaft and the induced voltage (EMF) can be found on-line.
According to what I see on the diagram of page 17, the belt drives are connected to dynamos which are motors, so the same concept applies.